

Loss of control of helicopters when in Instrument Meteorological Conditions (IMC) has sadly taken the lives of far too many helicopter crews. Whilst many of these incidents have been when non-instrument pilots inadvertently entered cloud, there are several accidents where instrument rated pilots have lost control. Training of instrument rated pilots in Unusual Attitude (UA) recovery is therefore part of the instrument rating syllabus and is an item on every instrument check ride.
Several key components are currently missing from the current crop of initialisms and acronyms used as aide memoires for UA recovery:
- Automation – Modern Instrument Flight Rules (IFR) capable machines invariably have an autopilot and mis-management of this automation can both induce a UA and make recovery more challenging.
- Cross-checks – Secondly, the potential for display faults and errors to cause a UA is well known. However, there is a critical need to evaluate these issues during a recovery so that the correct information is used to get the aircraft on an even keel.
- Low G hazards – Avoiding low G forces is vital to avoid conditions such as mast-bumping or blade strikes on the fuselage. Research suggests how this can be avoided in nose-high-conditions.
This article looks at the current state of play with helicopter UA recovery and suggests an improved approach which could be applied to future training.

Index
Current recovery theory
WASP – An inherited technique
As for many things in rotary aviation, the techniques for UA recovery have been adapted from fixed wing operations. The predominant technique is WASP as found in EHEST Flight Instructor Manual, Airlife’s The Helicopter Pilot’s Manual Volume 1 and the UK CAA Helicopter Examiners Handbook:
- Wings Level – Roll the aircraft using cyclic to a level flight attitude and balance with yaw pedals
- Attitude – Note attitude and apply correction using cyclic
- Speed – Note speed, if low do not increase power until it has risen about speed to avoid vortex ring condition
- Power – Apply power to achieve safe altitude

Oddly, AP3456 – Chapter 12, the UK military’s reference document for helicopter operations, is oddly lacking in any guidance on this topic
WASP – Limitations
When you consider this approach for just a few moments, you realise it is actually not very appropriate in several situations (helicopters generally also do not have wings). Let’s break it down.
1. Nose high UA
In a nose high UA, the speed is falling. For a fixed wing aircraft, the largest hazard is a stall. For helicopter pilots, it is much more complex. A nose high, speed reducing condition in itself is not immediately dangerous but the pilot actions at this stage can lead to problems:
- Pulling power – With rapidly falling airspeed and subsequent loss of altitude, pulling power before increasing airspeed could lead to entering the vortex ring state
- Low G – Pushing the cyclic to get back to level flight will reduce the G-loading of the helicopter. In teetering rotor systems this can cause mast-bumping (see incident on Aviation Safety Net where an R22 pilot survived a low G incident). In a more complex helicopter, low G conditions can lead to blade fuselage strikes to catastrophic effect (see incident on Aviation Safety Net where a Bell 429 recovering from a vortex ring training induced UA lost its tail due to a blade strike and crashed)

2. Instrument error
A pitot-static system blockage or artificial horizon fault can occur for a variety of reasons and can be the source of a UA. Trying to get out of the UA using the same incorrect information is a recipe for disaster. Many current texts on IMC UA recovery say “Trust your instruments!”. I think its more appropriate to use “Trust but verify your instruments”.

It does not take long to make a quick check across the cockpit to the standby instruments to verify that what you are seeing in front of you is truth data (or asking your Pilot Monitoring/Technical Crew Member to perform this check). This needs to happen early in the recovery. The priority is the attitude display with speed and altitude possibly left until later.
Modern glass cockpits have many automated cross-check systems and looking for these indications might be all that is required (no indications = trust what you see). However, a sub-threshold might still be a factor.
3. Automation in UA
As discussed in my article about the Red Button of Doom on EC135 automation on helicopters can get you into UA and can also make recovery harder. There have been many incidents where automation errors led to loss of control or controlled flight into terrain including:
- G-SPAU 17 February 2002 – Loss of control in IMC
- YR-CPC 28 November 2011 – Inadvertent disengagement of AFCS
- G-WNSB 23 August 2013 – Loss of control due to AFCS
It is therefore vital that automation is considered as part of the recovery process. It does not need to come first in the process as flying the aircraft is the first priority. The autopilot modes might fight the pilot initially but they can be disengaged in slower time once the aircraft is the right way up. Knocking out the AFCS was the direct cause of terminal loss of control in the G-SPAU incident above and the loss of N62UP on 25 May 2017 where the pilot knocked off the AFCS during an IFR go-around.

There will be some cases where an actuator runaway or jam requires pilot input as the very first action so application of TEM may be needed by the pilot. A reset of the AFCS might also be a rapid intervention that solves the cause of a UA (eg on H135, a “left-right-up” on the SAS reset switch should restore basic AFCS functionality following an inadvertent disengagement as in N62UP above.
From the opposite side of the argument, on machines with modern autopilots, automation might be the way out of trouble if used correctly. The Helionix autopilot on Airbus helicopters includes a “Recovery Function” where the pilot can rapidly engage a set of upper modes on the autopilot (ALT, HDG and IAS) to stabilise the situation. However, on early variants of the system, it could induce a rapid collective rise at low speed, potentially leading to the vortex ring state. The pilot therefore needed to action the initial recovery and ensure speed was above 30 kts before engaging the function. This has been solved in later versions.

In any case, AFCS must be considered as part of the UA recovery process.
The fixed wing world has made huge leaps in recent years with their UA recovery processes. This is now called Upset Prevention and Recovery Training (UPRT). Could this be applied to helicopters?
UPRT – Is modern fixed wing teaching the answer?
UPRT was introduced after several high profile fatal accidents involving automation and loss of control on airliners (such as the loss of Air France 447 – see Wikipedia article on Air France 447). It has introduced several techniques for recovery from stall events, nose high events and nose low events. See the GM1 to Appendix 9 of Part FCL in the Aircrew Regulation for a description of the different recovery options.
It is covered in various places, but the one that stood out can be found in the FAA Airplane Flying Handbook and is shown below:
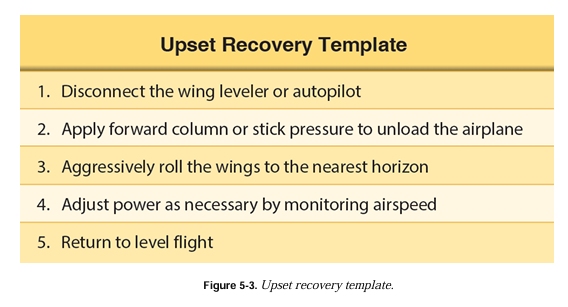
The first action is get rid of the autopilot. For IFR helicopters, which are generally unstable without any automation, this might be unwise.
The second action is to unload the aircraft by pushing forward on the stick. Again, this would be very unwise on a helicopter with a teetering head due to the rise of mast-bumping and on a complex helicopter due to the potential for blade strikes.
The aggressive roll to wings level (words which are not repeated in the UK regulations thankfully) is asking for another UA!
So in simple terms, whilst there is an abundance of guidance material about UPRT for fixed wing pilots such as Honourable Company of Air Pilots, Royal Aeronautical Society and GM1 to Appendix 9 of Part FCL in the Aircrew Regulation, there is little to no read across for helicopter operations. The only element that is worth taking away is that different recovery methods might be needed for a nose low and a nose high situation.
Note also that yaw is not mentioned at all in a fixed wing recovery. This is to prevent entering a spin. This is not something we need to worry so much about in helicopter UA recovery so yaw and balance control should be considered.
We have to create our own process.
Revised UA Recovery Method
Whilst there is plenty of research into fixed wing unusual attitude recovery, the helicopter world is not as well served. However, a US military research project in 1974 provides some useful results (although it does not cover any automation) – read it here – US Flight Test Investigation. Some of the main points are summarised below:
- For a nose down UA:
- Best method is to roll wings level and pitch to level
- Increased G-loading could lead to further UA or retreating blade stall
- Combining roll and pitch may be necessary at low altitude
- For a nose up UA:
- Negative G forces could induce a feeling of loss of control
- If pitch and collective are reduced simultaneously, high negative G can be induced
- The use of bank into a turn can help keep a positive G during recovery and reduces recovery time
- A straight push on cyclic may be suitable for small nose up UA

So, not a lot new in the nose down case but the nose up research outcomes need use to re-examine the basics of WASP. The research found that rolling up to the nearest 30 degree mark on the artificial horizon had some important effects:
- The nose dropped back to level faster and naturally
- Positive G could be maintained more easily
These are hugely important factors and should be incorporated into a recovery methodology.
Inputs to the new method
To improve on WASP, we have therefore a need to include 3 new elements:
- A rolling recovery from nose high upsets as discussed above
- A consdieration of automation during the process
- A cross check of instruments to make sure we are using truth data
We of course also need to recognise most helicopters do not have wings!
Birth of FRYAPA
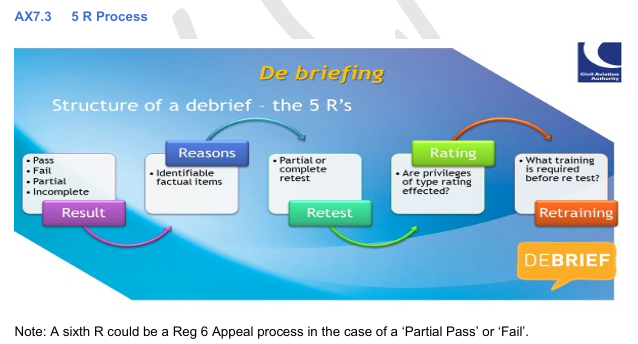
An aide memoire needs to be memorable, simple and must cover most situations. A key goal should be creating something that does not rely of repeated review to remember. A great example of how not to do this, is the CAA’s method for debriefing check rides – the 5 Rs – it is really really hard to remember which R is which!
We also want something that sounds like it is written and can be said easily as a noun (eg “Do your WASP checks”). How many people stumble over the initialism DPBL for Defined Point Before Landing in Performance Class 2 helicopter operations?
With these points in mind, FRYAPA is an aide memoire on the points we need to action for a helicopter UA:
- Flight Displays
- Roll
- Yaw
- Attitude
- Power
- Automation
Flight Displays
Very quickly we need to determine what we are seeing on the instruments is truth. We cannot trust our senses (they may be the cause of the UA) but we have to rapidly transition to a trusted set of displays to action the recovery.
On older types with mechanical displays, there is unlikely to be any automated cross-cockpit error checking. The Mk1 eyeball needs to scan quickly to ensure the displays match across the machine. The primary focus should be the artificial horizon but mismatches between pressure instrument might also be useful points to note.

In modern glass cockpits, the automated cross checks may help highlight faults and/or highlight what is truth. An expert level of knowledge of the displays and how they enunciate cross-check errors is needed.
For better or for worse, the pilot needs to make a quick judgement of what is truth and act on it. If it is not working later, this can be revisited.
Roll
Instead of always rolling wings level as in WASP, we need to build on the 1974 research. Firstly we need to assess whether we are nose high or low. For nose low recoveries, the cyclic is used to level the aircraft. However, for a nose high recovery a roll to the nearest 30 degree mark is better. This is then reduced as the nose comes level with the horizon.
Yaw
A large out of balance condition can be a sure way to induce or sustain a UA. Correct of yaw inputs should be simultaneous with correct of roll or very close behind it during the recovery process. Whilst the fidelity of desktop simulators is not quite up to FFS D levels, a large yaw input induced a very convincing UA as shown below

Attitude
We now need to focus on the resulting attitude. A large nose down attitude will lead a rapid loss of height and rapid approach to limiting airspeeds. As discussed in the research above, a large cyclic input in pitch is not advised as the high G forces might lead to reaches the limits of the rotor system (eg huge NR spikes or retreating blade stall). Therefore a recovery input in pitch should be made smoothly. Dependent on airspeed and altitude, this should be made to near-level attitude with an accelerative or decelerative component based on the situation.
Unlike on fixed wing, nose down does not necessarily mean going down (see image below). The recovery of airspeed is the primary consideration for selecting the correct attitude, not the altitude.

Power
Once we are the right way up and on the way to the correct speed, we need to select a power appropriate to our circumstances whilst maintaining the helicopter within its limits. A screaming climb to safety altitude is unlikely to be necessary unless you are very low or very close to terrain. A UA can easily be re-introduced by excessive use of collective (as test pilots know well, M theta coll is destabilising!)
Automation
Now on the way to safety, attention should be given to the automation. Did it induce the UA I just had? Do the controls or automation feel like they are fighting me? As discussed in our article on 3-axis autopilots, a progressive approach is needed. If the NAV mode is taking you towards the mountain, step down to HDG and turn away. If the ATT mode is causing issues, step down to SAS. Think really really carefully before jumping straight to un-stabilised flight; it has been repeatedly fatal. Sometimes though, people just get lucky and survive – read about the crew of N531LN who survived a vicious upset event after disengagement of the AFCS in VMC.
As mentioned before, on some types automation can actually help you (read about the H160 AFCS here on AIN Online). The automation step requires thought – do I want to step up or down with automation in the scenario I have?
This gives us some key considerations:
- Is the automation or controls fighting me? – step down the automation level
- Could automation help me get back to level? – step up the automation level
The last thing is to check the AFCS is trimmed/coupled and relax on the controls slightly before doing anything else. A pause at this stage checks for stability before trying to re-program the FMS!
Final Thoughts
With this new method, all points are covered. However, this needs to be introduced carefully into any training programme to ensure it is applicable to the aircraft type and its operation. There are also some considerations for training and checking for UA in helicopters.
Specifying recovery parameters
Current training and checking methods in the UK specify that the examiner or instructor should specify the applicable recovery parameters for the scenario. This may be necessary to ensure separation from real world limitations (eg airspace, weather or terrain) but instructors and examiners should not be overly prescriptive. Seeing what the candidate considers to be safe and sensible recovery parameters is as much part of the learning process as the actual manoeuvre!
Training UA in the helicopter
In simulating a UA in a helicopter we are intentionally inducing an Undesired Aircraft State (UAS) which is what TEM tries to avoid! Instructors and examiners must be careful to bound the situation so they can recover the situation if the candidate gets it wrong. Key points are:
- UA should be realistic but not extreme in thehelicopter
- Following through on the controls closely so rapid intervention can be effected whilst not impeding the candidates inputs
- Getting the candidate to place their head out of the normal alignment with the direction of travel as training progresses. This makes the UA much more realistic due to vestibular errors
- Degrading displays should be done only when accurate displays for the instructor/examiner are available
- The instructor/examiner should consider talking about their setup manoeuvres but doing something completely different to discombobulate the candidate
- Using appropriate vision restricting devices for the candidate whilst not restricting the instructor/examiner’s view
- Setting no-go recovery attitudes or bank angles where the instructor/examiner will intervene.
- Creating sufficient margins from airspace, weather and terrain before entry
- UA must only be induced in solid VMC by day with a good horizon
- Intervene early to allow a repeat – late intervention is too late

Training UA in an FSTD
The instructor or examiner has much more leeway to induce extreme UA in an FSTD but realism should still be a consideration. Once a UA goes beyond the capability of a motion system, the training value drops rapidly (the flight model is likely to be less realistic in extreme attitudes as well).
Inducing a UA from the cockpit as an instructor/examiner is very similar to the aircraft. However, to induce a UA from the instructor operating station can be very difficult, dependent on the simulator capabilities. A pitot static failure can be used to create an insidious UA but results can be extremely unpredictable. A compromise may be to ask the candidate to fly the aircraft whilst looking back at the instructor/examiner. Simply asking the candidate to close their eyes is prone to cheating!

Automation in training for UA
Automation must form part of the UA training process where it is fitted to the aircraft. It is unacceptable to only train for UA where the upper modes are disengaged first.
At least one UA should be induced with some or all of the AFCS upper modes still engaged. This can usefully be combined with the failure of the primary flight display such that the candidate does not have the AFCS indications in front of them. It can be very instructive to candidates to find the aircraft merrily turning again as soon as they release the controls following a UA recovery because they had not checked what modes were coupled.
On some aircraft where the AFCS can be either coupled to a mode or uncoupled via a flight director, it is very important to train and check for both cases. On Bell 429 helicopters, an apparently fully functioning AFCS can be uncoupled and not helping the pilot at all if they do not check they are in Attitude mode first!

Summary
The current aide memoires for helicopter UA recovery are inadequate and miss several key points: automation, nose up recoveries and cross checking. The FRYAPA method aims to address these issues.
Let us know what you think. Take a moment to look at our other articles.
- Keeping up with the Norwegians – Six amazing innovations for UK HEMS
- LNAV/VNAV (SBAS) – Are they approved for use in the UK?
- Helicopter 2D IFR approaches – Is CDFA the best choice?
- Understanding Helicopter Flight Manuals – Everything you need to operate safely
- Post Maintenance Flight Tests – How to avoid fatal traps
Leave a Reply